We are accustomed to teaching with a model in front of a child, but these instructions should make it so that anyone can build one without our presence. We urge that parents and teachers be there to guide – but to allow the child to try to let the materials (and a picture of the final product) guide them. A wrong direction is always un-doable until you've glued something.
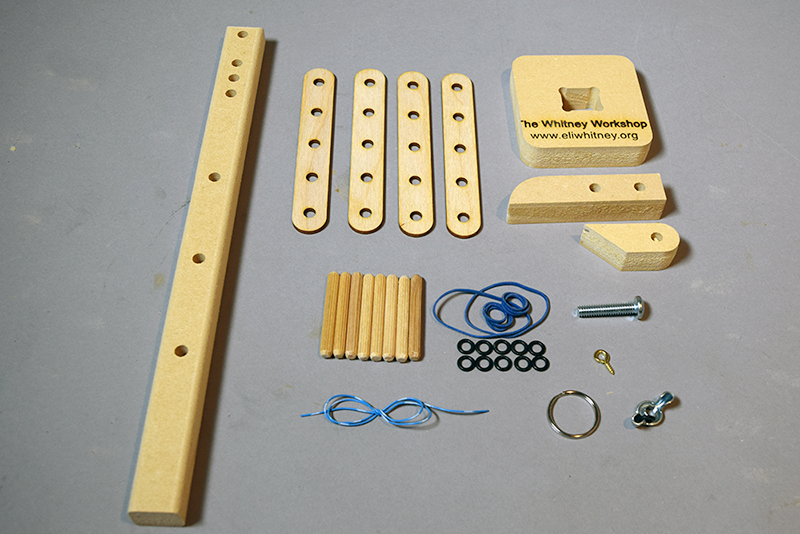
The Parts.
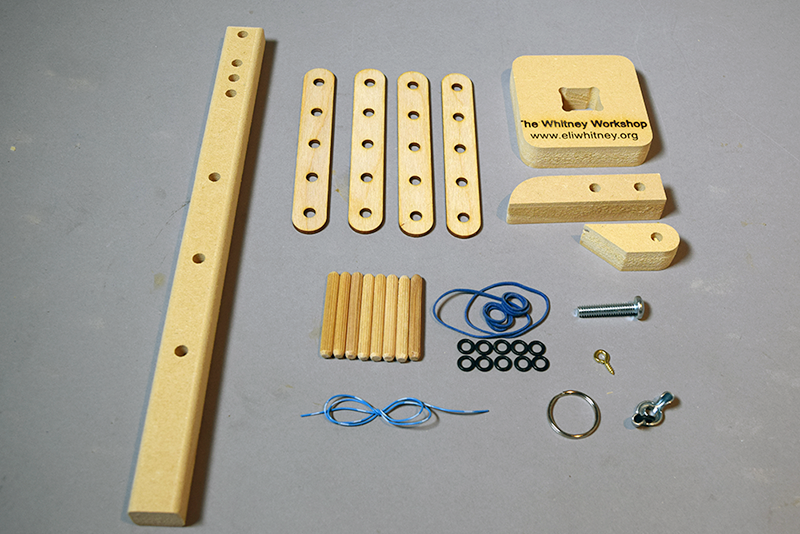
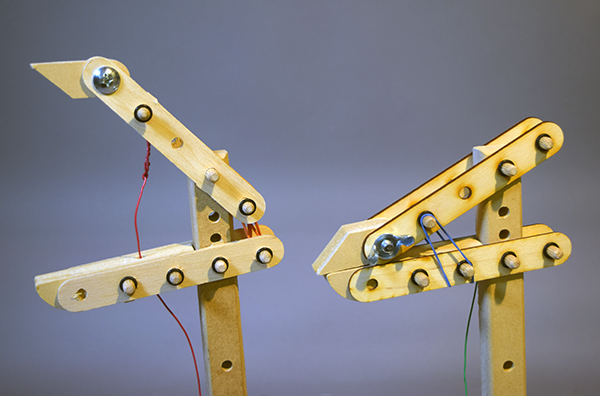
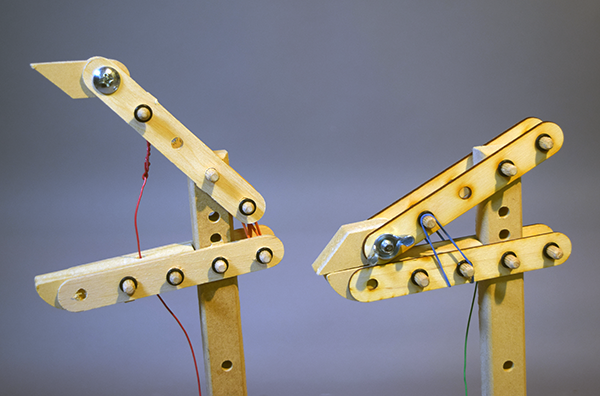
This will give you an Inventive Arm which has a fixed bottom (jaw/finger) and a moveable upper finger with a hinged digit at the end. Look at the picture. Two versions: either Always Open or Always Closed
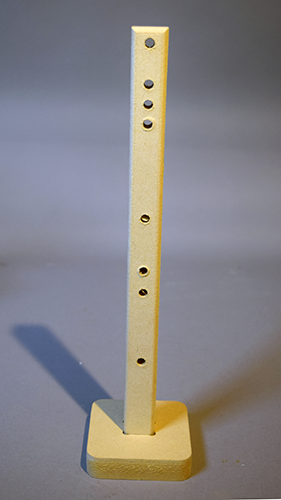
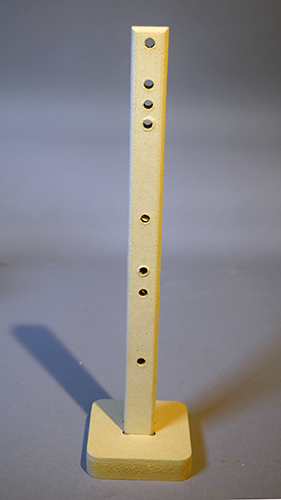
Step 1. Place the long stick with holes into the base. Make sure it is not upside down. Look at the picture.
Step 2 and Step 3 Attach the linkage pieces as shown and then insert the 3/4" thick piece with the hole in it between the linkage pieces as shown. Push the dowels through the holes to hold these pieces on. If needed add the O rings to keep them in place if they get loose.

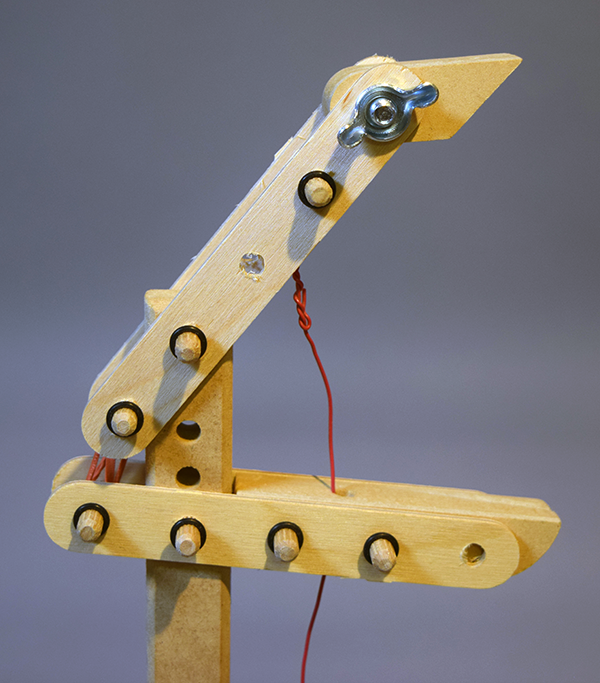
Step 4 Put the other two linkage pieces at the top of the stick and attach with a dowel as shown (use o ring if needed). Add another dowel through the holes behind the stick as well (the rubberband will hook onto this one soon).

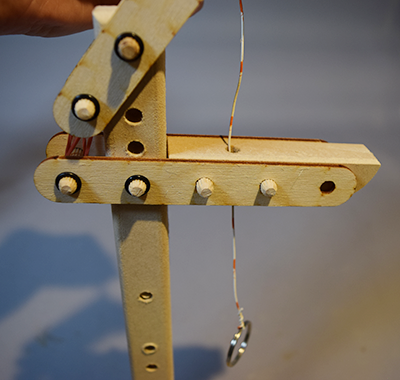
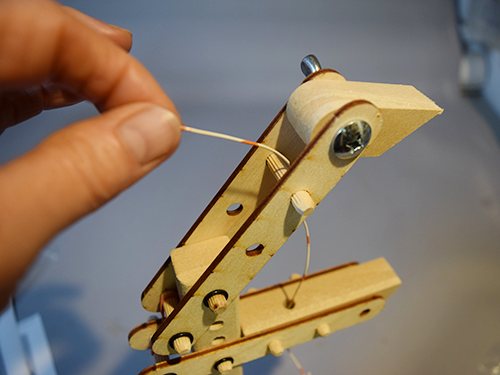
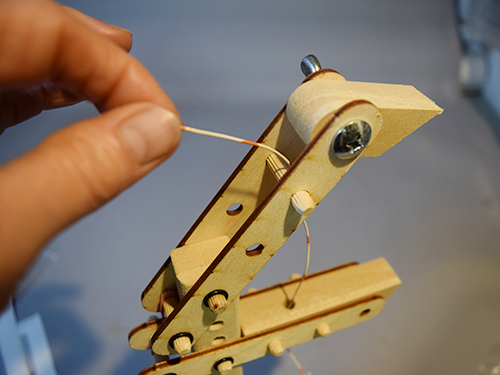
Step 5 Attach the short fingertip piece as shown using the bolt instead of a dowel. The Wing Nut is screwed on the other side of the bolt to hold it on and adjust the tightness. (see images below)


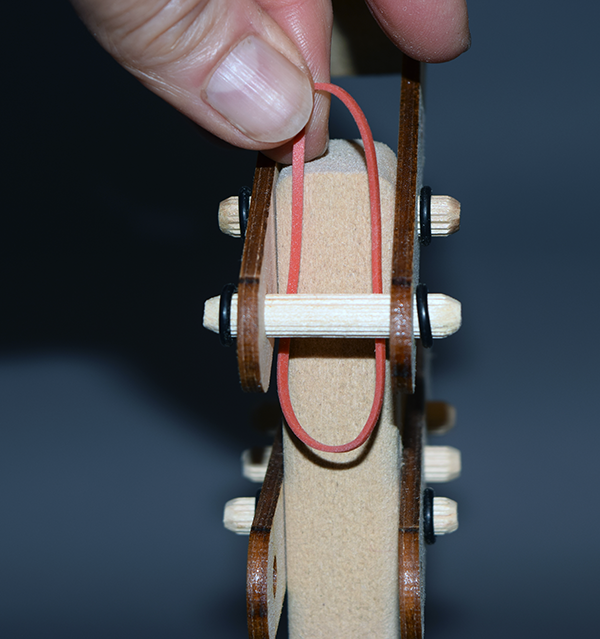
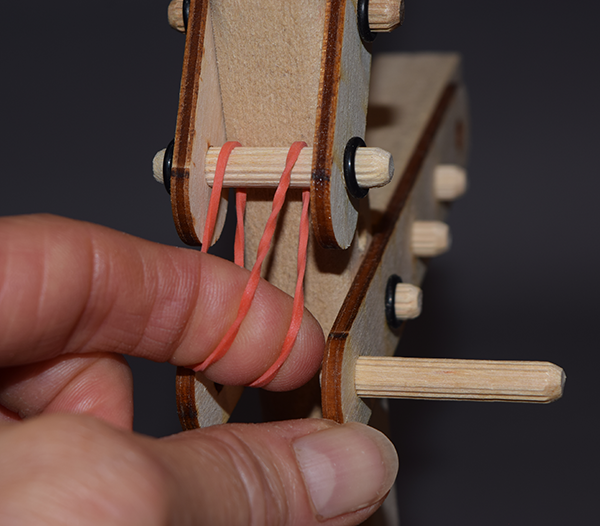
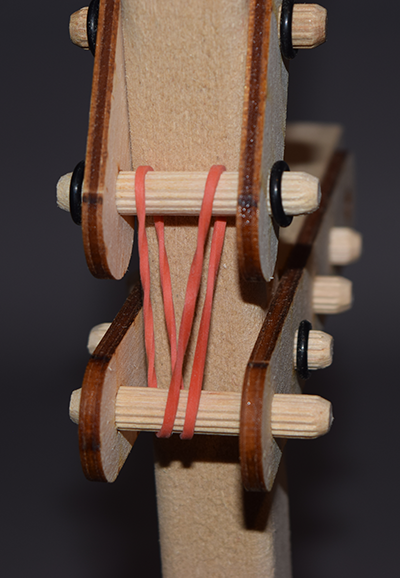
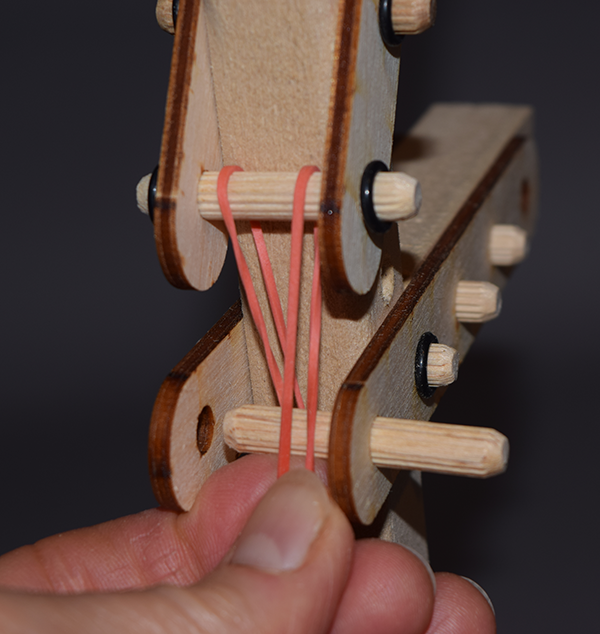
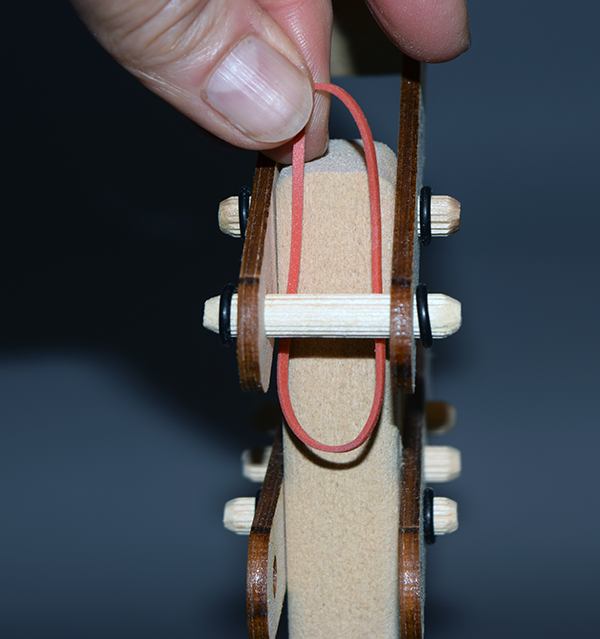
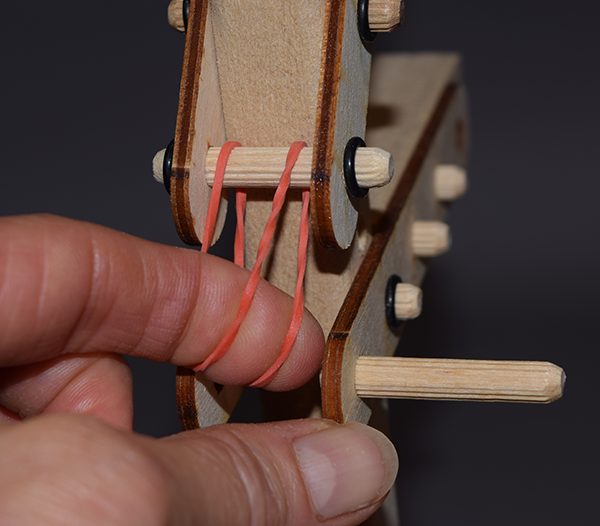
Step 6 -7 Place the rubber band as shown behind the top dowel at the end of the upper assembly. Then fold the top loop over the down and put your finger through both loops. Slide another dowel through both loops to attach them to the end of the lower bar.
The photos should explain how it will look when the top and bottom parts are attached. If you have another way to to it that's ok too.

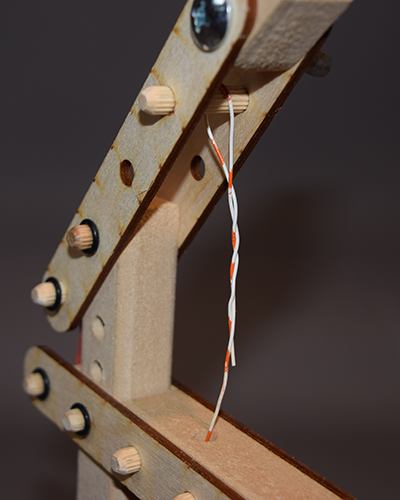
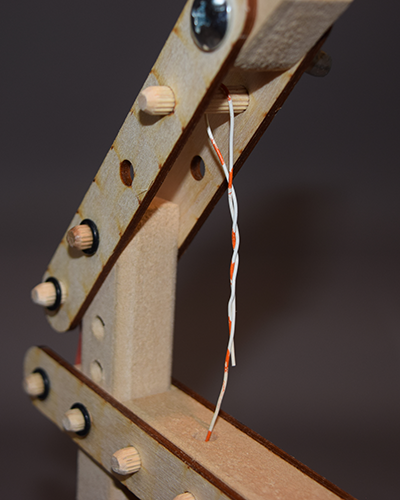
Step 8-10 The last steps show how to attach the wire with the loop to another dowel you put into the upper moveable arm.
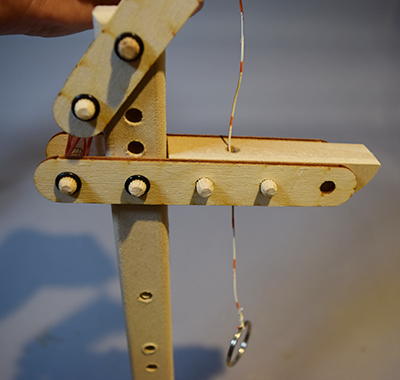
Now try to pick up different materials with your robot hand. You may have to adjust the 'fingertip' to grab different things. Experiment!