For School Groups
- School Program
- Costs 14.00 per student
- Takes about 1.50 hours
- Designed for 3rd grade, 4th grade, 5th grade, 6th grade, 7th grade and 8th grade
- Theme: Basic Skills, Design and Invention
Description
Themes
Anatomy
Simple Machines
Design Engineering
Robotics
Evolution
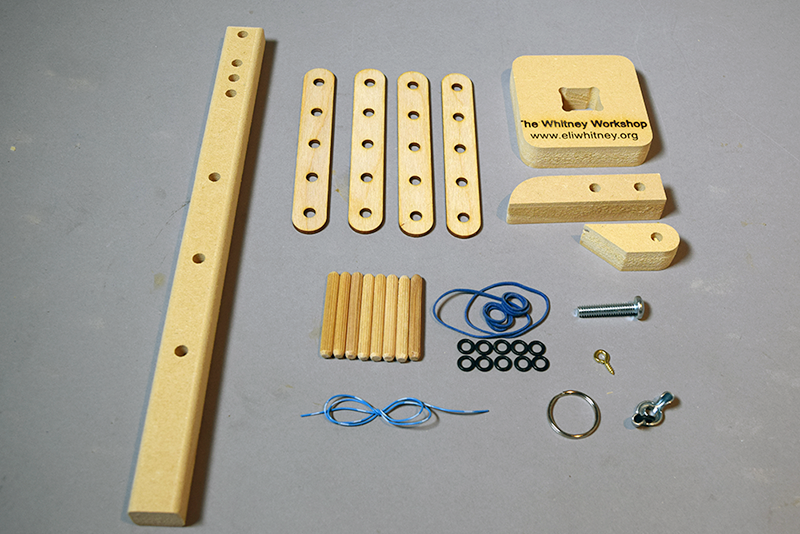
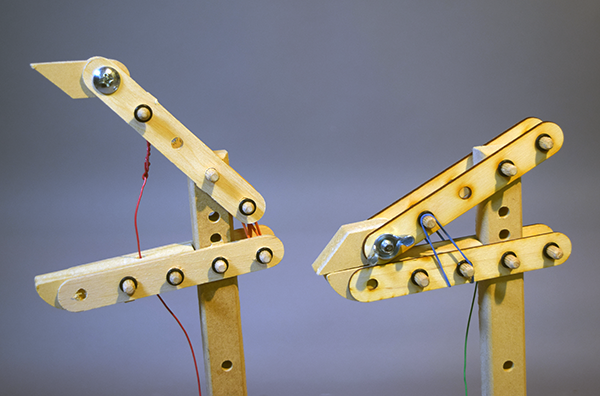
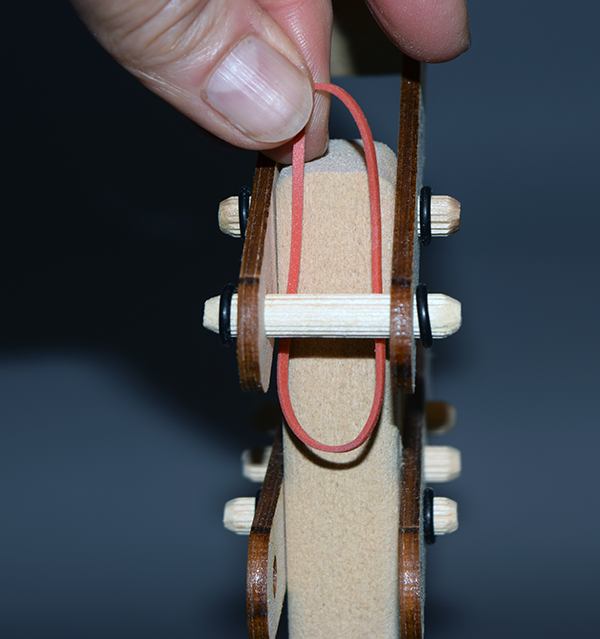
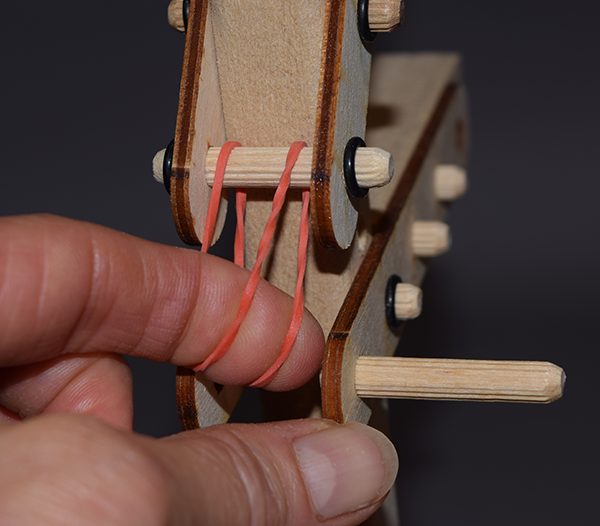
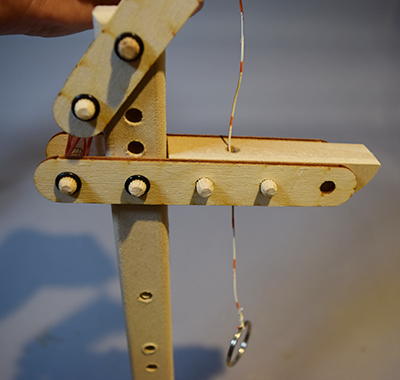
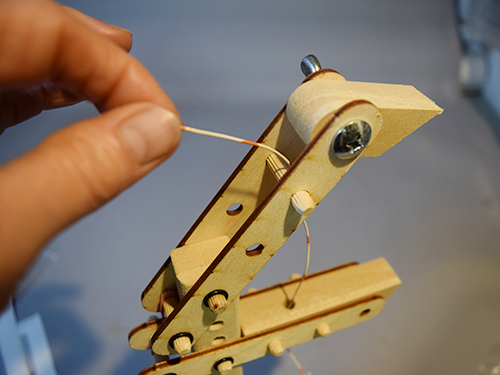
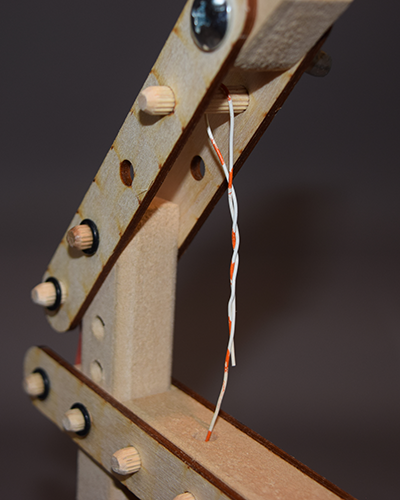
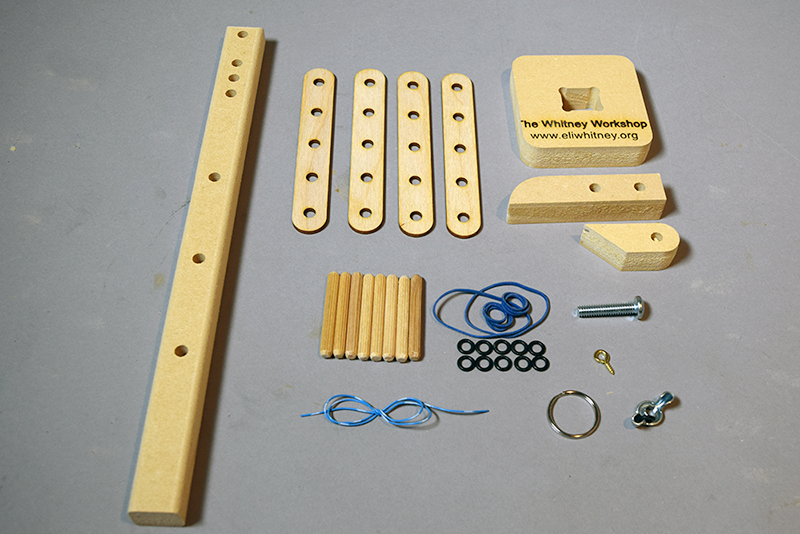
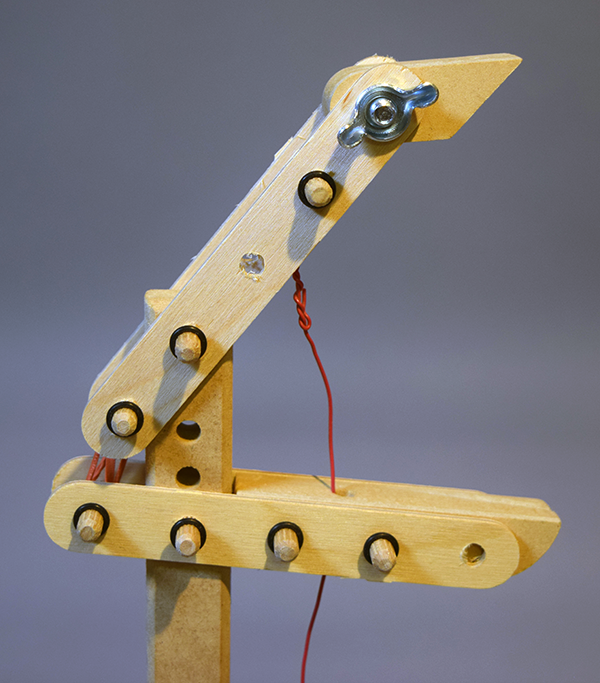
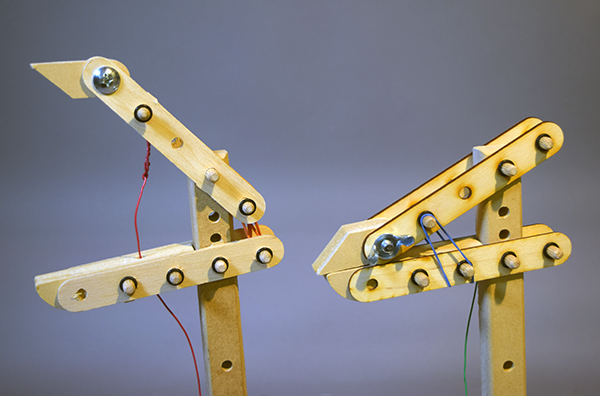
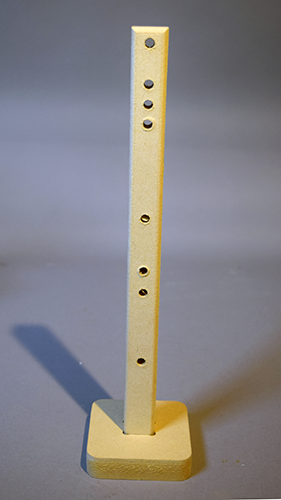
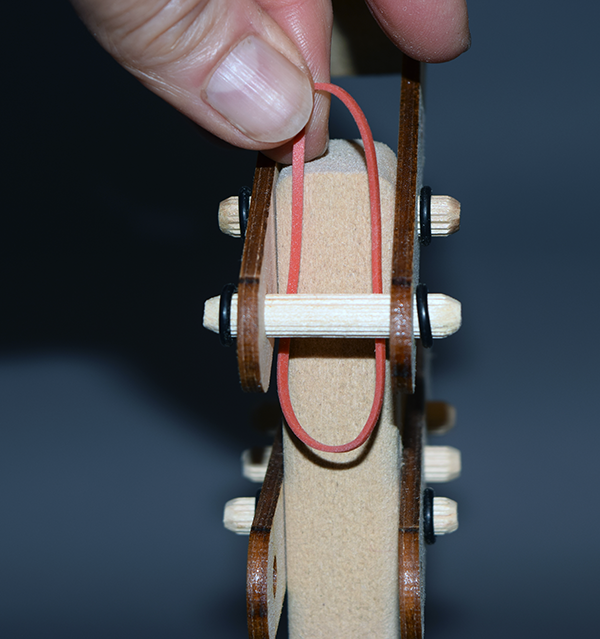
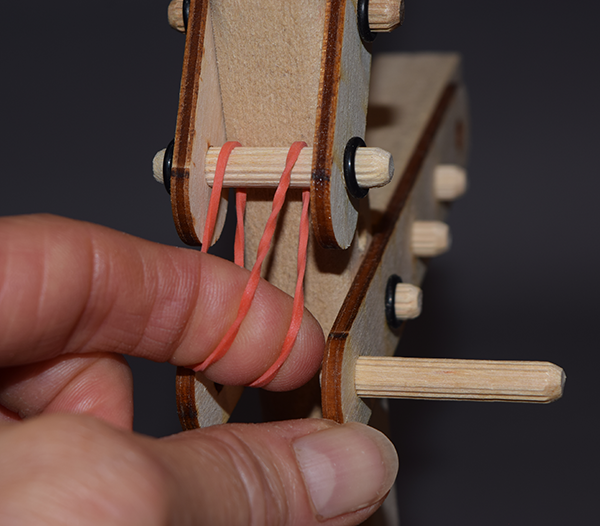
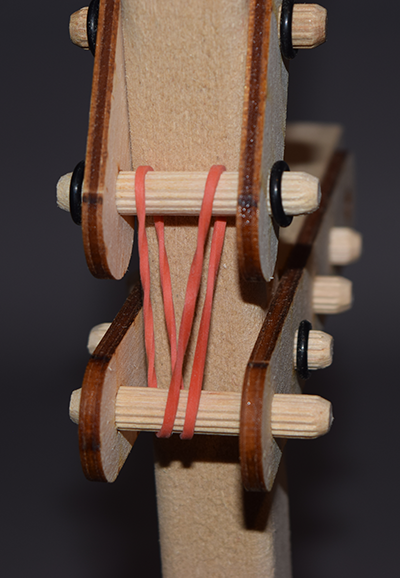
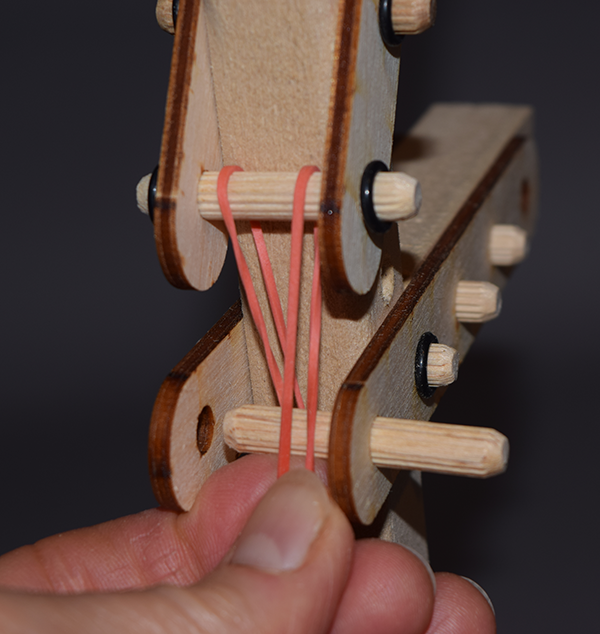
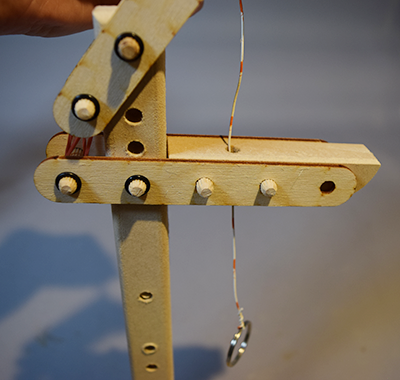
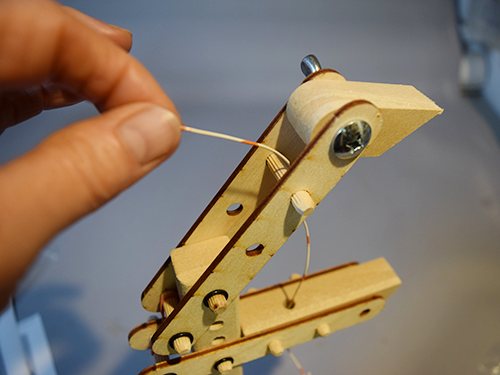
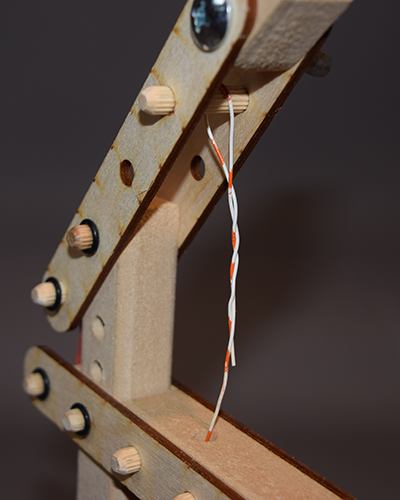
With modular wooden pieces, wire and rubber bands, construct a hand with fingers. The parts will work in a dozen basic configurations.
Test your design
Retrieve a lifesaver, a penny, a marble from a cup. Pick up a marker and draw. Pop a balloon. Propose your own challenge. Invent games two hands can play.
Outcomes
Each task may require specific adjustments. Some hand configurations are more versatile than others. Discover the interplay between tasks and design.
Meets Connecticut Science Standards
- 4.1: The position and motion of objects can be changed by pushing or pulling.
Meets Common Core Standards
- 4-PS3: Energy
Meets Next Generation Science Standards
- 4-PS3-4: Apply scientific ideas to design, test, and refine a device that converts energy from one form to another
- 3-5-ETS1-1: Define a simple design problem reflecting a need or a want that includes specified criteria for success and constraints on materials, time, or cost.
- 3-5-ETS1-2: Generate and compare multiple possible solutions to a problem based on how well each is likely to meet the criteria and constraints of the problem.
- 3-5-ETS1-3: Plan and carry out fair tests in which variables are controlled and failure points are considered to identify aspects of a model or prototype that can be improved.